Como conectar un servomotor a Arduino
Te vamos a guiar a través de un tutorial completo y detallado para que domines el control de servomotores utilizando una placa Arduino. Este proyecto es fundamental en el mundo de la robótica y la automatización, y con esta guía paso a paso, código explicado y consideraciones eléctricas, tendrás todo lo necesario para implementarlo con éxito.
Aspectos Clave para el Control de Servomotores con Arduino
- Precisión y Versatilidad: Los servomotores, a diferencia de los motores de corriente continua, permiten un control angular exacto gracias a su sistema de retroalimentación interno, ideal para robótica y automatización.
- Conexión Sencilla y Alimentación Crítica: Requieren solo tres cables (VCC, GND y Señal) y se conectan a pines PWM de Arduino. Para servomotores grandes o múltiples, es fundamental usar una fuente de alimentación externa con tierras comunes para evitar problemas.
- La Librería Servo.h: El IDE de Arduino incluye la librería
Servo.hque simplifica enormemente la programación, permitiendo controlar la posición del servo con la funciónwrite()y mapear entradas analógicas conmap().
Comprendiendo el Servomotor: Más Allá de un Simple Motor
Un servomotor es un tipo de motor eléctrico especializado que ofrece un control preciso sobre la posición angular de su eje. A diferencia de un motor de corriente continua (DC) que gira libremente, un servomotor puede moverse a una posición específica y mantenerla. Esta capacidad se debe a su diseño interno, que incorpora varios componentes clave trabajando en conjunto.
Anatomía Interna de un Servomotor
Para entender cómo controlarlo, es crucial conocer sus partes internas:
- Motor DC: Es el componente principal que genera el movimiento rotatorio.
- Caja Reductora (Engranajes): Un conjunto de engranajes acoplados al motor DC. Su función es reducir la velocidad de rotación del motor y, a cambio, aumentar significativamente el par (torque). Esto permite movimientos más lentos, controlados y con mayor fuerza.
- Potenciómetro: Este sensor de posición, conectado al eje de salida, proporciona retroalimentación sobre la posición angular actual del servomotor. Es como el «ojo» del servo, informando al circuito de control dónde se encuentra el eje en todo momento.
- Circuito de Control (Electrónica): Una pequeña placa de circuito impreso que actúa como el «cerebro» del servomotor. Recibe la señal de control (generalmente una señal de Modulación por Ancho de Pulso o PWM) desde un microcontrolador como Arduino. Basándose en esta señal y la retroalimentación del potenciómetro, el circuito de control ajusta la dirección y la potencia suministrada al motor DC para que el eje alcance y mantenga la posición deseada.
Los servomotores más comunes, como el SG90, tienen un rango de movimiento limitado, típicamente de 0° a 180°. Sin embargo, también existen servomotores de rotación continua que giran 360°, aunque en estos últimos se controla la velocidad y dirección de giro, perdiéndose el control preciso de una posición angular fija.
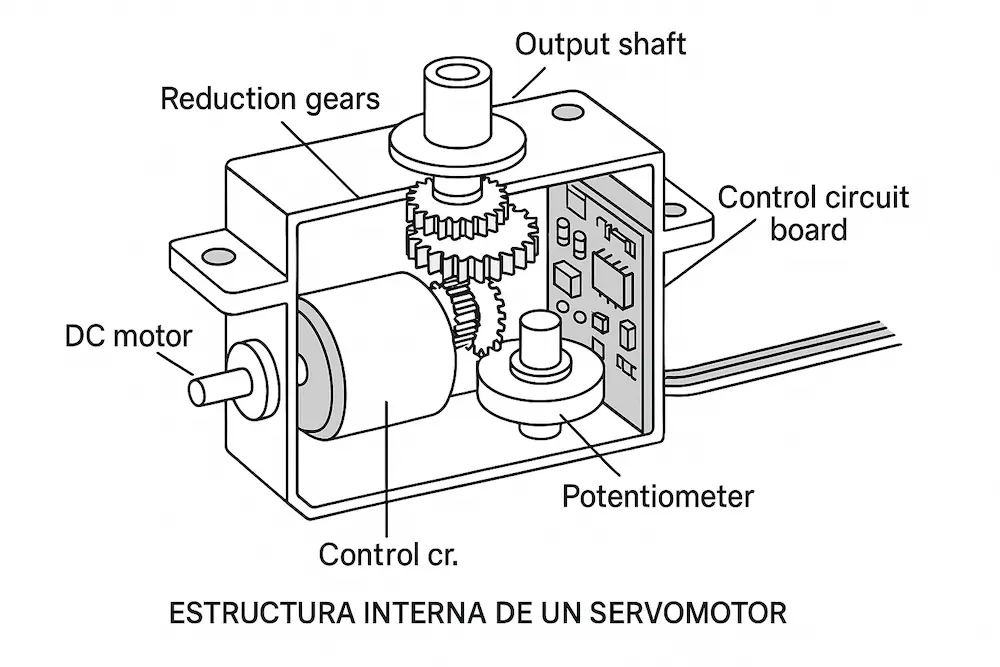
Estructura interna de un servomotor, mostrando sus componentes clave.
El Principio de Control: Pulsos PWM
El control de un servomotor se realiza mediante una señal PWM (Pulse Width Modulation). El Arduino envía una serie de pulsos con una duración específica, generalmente con un periodo de 20 milisegundos (50 Hz). La duración del pulso dentro de este periodo determina la posición angular del servomotor:
- Pulso Corto (aprox. 1 ms): Corresponde a 0° (o una de las posiciones extremas).
- Pulso Medio (aprox. 1.5 ms): Corresponde a 90° (la posición central).
- Pulso Largo (aprox. 2 ms): Corresponde a 180° (o la otra posición extrema).
La librería Servo.h de Arduino se encarga de generar estos pulsos de manera automática, simplificando la programación a un simple comando write(angulo).
Materiales Esenciales para tu Proyecto
Para llevar a cabo este tutorial, necesitarás los siguientes componentes. La elección del servomotor dependerá de la fuerza y el tamaño que requiera tu aplicación.
Lista de Componentes
- Placa Arduino: Un Arduino Uno es ideal para empezar, pero también puedes usar un Arduino Nano, Mega, o similar.
- Servomotor:
- Para principiantes y proyectos pequeños: SG90 (Micro Servo 9g). Es económico, de bajo consumo y muy fácil de usar.
- Para proyectos que requieran más fuerza: MG995 o MG996R. Estos son más grandes y potentes, pero consumen más corriente y pueden requerir una fuente de alimentación externa.
- Cables de Conexión: Cables macho-macho y/o macho-hembra, dependiendo de las conexiones que necesites entre tu Arduino, el servomotor y el protoboard.
- Protoboard (opcional pero recomendado): Facilita la organización de las conexiones y las pruebas, evitando soldaduras iniciales.
- Cable USB: Para conectar tu placa Arduino a la computadora.
- Computadora: Con el IDE de Arduino instalado. Puedes descargarlo de forma gratuita desde la página oficial de Arduino.
- Potenciómetro (opcional): Un potenciómetro de 10 kΩ lineal si deseas controlar la posición del servo de forma interactiva.
- Fuente de Alimentación Externa de 5V (CRÍTICO para servos grandes o múltiples): Para evitar sobrecargar el Arduino. Puede ser un adaptador de 5V y 1A (o más, según el servo), o un «power bank». Es crucial para la estabilidad del sistema.
- Condensador Electrolítico (opcional pero recomendado): Un capacitor de 100 µF o 470 µF (con un voltaje superior a 5V, por ejemplo, 6.3V) para colocar entre los pines de alimentación (VCC y GND) del servomotor. Ayuda a suavizar los picos de corriente y filtrar el ruido eléctrico, lo que puede prevenir vibraciones y reinicios inesperados del Arduino.
Realizando las Conexiones Eléctricas: Paso a Paso
La conexión de un servomotor a Arduino es relativamente sencilla, pero prestar atención a los detalles de la alimentación es crucial para el buen funcionamiento de tu proyecto.
Identificación de los Cables del Servomotor
Un servomotor típico tiene tres cables con colores específicos:
- Rojo: Alimentación (VCC) – Se conecta a +5V.
- Marrón o Negro: Tierra (GND) – Se conecta a GND.
- Naranja, Amarillo o Blanco: Señal de Control – Se conecta a un pin digital del Arduino, preferiblemente uno con capacidad PWM.
Diagrama de Conexión Básico (Servo SG90 y Arduino Uno)
Para un servomotor pequeño como el SG90, puedes alimentarlo directamente desde el Arduino para pruebas simples. Sin embargo, ten en cuenta las limitaciones de corriente del Arduino.
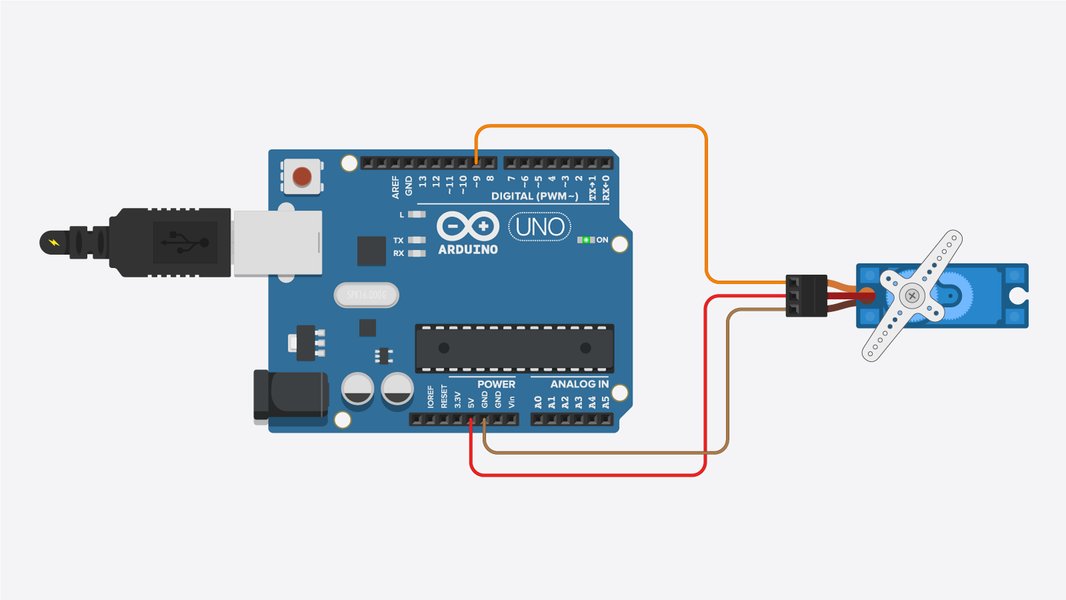
Conexión directa de un servomotor a un Arduino para pruebas básicas.
Pasos de Conexión:
- Cable Rojo (VCC del Servomotor): Conecta este cable al pin de 5V de tu placa Arduino.
- Cable Marrón/Negro (GND del Servomotor): Conecta este cable a uno de los pines GND de tu placa Arduino.
- Cable Naranja/Amarillo/Blanco (Señal del Servomotor): Conecta este cable a un pin digital de tu Arduino que soporte PWM. Los pines PWM en un Arduino Uno suelen estar marcados con un símbolo de tilde (~) junto al número (por ejemplo, pines 3, 5, 6, 9, 10, 11). Para este tutorial, usaremos el Pin 9.
Consideración Crítica: Alimentación Externa
Este es uno de los puntos más importantes y una fuente común de problemas. Los servomotores, especialmente los modelos más grandes o cuando están bajo carga, pueden consumir picos de corriente significativos que el pin de 5V del Arduino (que entrega hasta 500mA si se alimenta por USB, o hasta 1A si se alimenta por el conector de barril) no puede suministrar adecuadamente. Esto puede causar un comportamiento errático del servo, vibraciones, o incluso el reinicio inesperado de tu Arduino.
Conexión con Fuente de Alimentación Externa:

Conexión de un servomotor utilizando una fuente de alimentación externa, esencial para servos grandes o múltiples. https://arduinogetstarted.com/
- Cable Rojo (VCC del Servomotor): Conecta este cable al pin positivo (+5V) de tu fuente de alimentación externa.
- Cable Marrón/Negro (GND del Servomotor): Conecta este cable al pin negativo (GND) de tu fuente de alimentación externa.
- Conexión de Tierras Comunes: Es ABSOLUTAMENTE CRÍTICO conectar el pin GND de tu fuente de alimentación externa a uno de los pines GND de tu placa Arduino. Esto establece una referencia de tierra común para todo el sistema, lo cual es fundamental para que las señales de control funcionen correctamente. Nunca conectes el pin de +5V de la fuente externa directamente al pin de 5V del Arduino.
- Cable Naranja/Amarillo/Blanco (Señal del Servomotor): Mantenlo conectado al mismo pin digital (por ejemplo, Pin 9) de tu Arduino.
Recomendación del Condensador (Opcional pero muy útil):
Para una mayor estabilidad y para reducir el ruido eléctrico, puedes añadir un condensador electrolítico (por ejemplo, 100 µF o 470 µF) en paralelo con los pines de alimentación del servomotor (entre VCC y GND del servo). Asegúrate de respetar la polaridad del condensador (la banda rayada generalmente indica el lado negativo/GND).
Programando el Servomotor con Arduino: La Librería Servo.h
La programación del servomotor en Arduino se simplifica enormemente gracias a la librería Servo.h, que viene preinstalada en el IDE de Arduino. Esta librería se encarga de generar los complejos pulsos PWM necesarios para el control del servo.
Paso 1: Preparación del IDE de Arduino
- Abre el IDE de Arduino en tu computadora.
- Asegúrate de que tu placa Arduino esté conectada y seleccionada correctamente. Ve a Herramientas > Placa y selecciona tu modelo (por ejemplo, «Arduino Uno»).
- Luego, ve a Herramientas > Puerto y selecciona el puerto COM al que está conectado tu Arduino.
- La librería
Servo.hdebería estar ya incluida. Puedes verificarlo yendo a Programa (Sketch) > Incluir Librería > Servo. Esto añadirá automáticamente la línea#include <Servo.h>al inicio de tu código.
Paso 2: Código Básico de Barrido («Sweep»)
Este es el ejemplo más fundamental y popular. Hará que el servomotor se mueva de 0° a 180° y luego regrese a 0° de forma continua, creando un efecto de barrido.
#include <Servo.h> // Incluye la librería Servo
Servo miServo; // Crea un objeto Servo para controlar el servomotor
void setup() {
miServo.attach(9); // Asocia el objeto miServo al pin digital 9 del Arduino
// Asegúrate de conectar el cable de señal del servo a este pin
}
void loop() {
// Mueve el servo de 0 a 180 grados
for (int angulo = 0; angulo <= 180; angulo += 1) { // Incrementa el ángulo en 1 grado
miServo.write(angulo); // Envía el ángulo al servomotor
delay(15); // Espera 15 milisegundos para que el servo se mueva a la posición
}
// Mueve el servo de 180 a 0 grados
for (int angulo = 180; angulo >= 0; angulo -= 1) { // Decrementa el ángulo en 1 grado
miServo.write(angulo); // Envía el ángulo al servomotor
delay(15); // Espera 15 milisegundos para que el servo se mueva a la posición
}
}
Explicación del Código:
#include <Servo.h>: Esta línea es fundamental; importa todas las funciones necesarias de la librería Servo.Servo miServo;: Declara una instancia de la claseServo.miServoes el nombre que le damos a nuestro objeto servo, y lo utilizaremos para interactuar con él.miServo.attach(9);: En la funciónsetup(), esta línea «adjunta» el objetomiServoal pin digital 9 del Arduino. Esto le dice a la librería Servo qué pin utilizará para enviar la señal de control PWM al servomotor.miServo.write(angulo);: Esta es la función clave para mover el servomotor. Le pasas un valor de ángulo en grados (de 0 a 180 para la mayoría de los servos) y el servomotor intentará moverse a esa posición.delay(15);: Un pequeño retraso es necesario para permitir que el servomotor tenga tiempo de moverse a la posición deseada antes de que se le envíe la siguiente instrucción de ángulo. Puedes ajustar este valor para controlar la velocidad del movimiento. Valores más pequeños harán el movimiento más rápido, pero pueden ser más bruscos, y valores más grandes lo harán más lento y suave.- Los bucles
forse encargan de incrementar y decrementar el ángulo para crear el movimiento de barrido.
Paso 3: Subir y Probar el Código
- Una vez que hayas copiado el código en el IDE de Arduino, haz clic en el botón «Verificar» (el icono de la paloma o un checkmark) para compilar el código y asegurarte de que no haya errores de sintaxis.
- Luego, haz clic en el botón «Subir» (la flecha hacia la derecha) para cargar el código en tu placa Arduino.
- Si todo está conectado correctamente y el código se sube sin problemas, deberías observar cómo tu servomotor comienza a moverse suavemente de 0 a 180 grados y viceversa de forma continua.
Control Interactivo: Servomotor con Potenciómetro
Para un control más dinámico y manual, podemos usar un potenciómetro para variar la posición del servomotor. Al girar el potenciómetro, el servomotor cambiará su ángulo en tiempo real.
Materiales Adicionales y Conexión del Potenciómetro
- Material: Un potenciómetro de 10 kΩ.
Conexión del Potenciómetro:
Un potenciómetro tiene tres pines:
- Pin Lateral (extremo 1): Conecta a 5V (de tu Arduino o fuente externa).
- Pin Lateral (extremo 2): Conecta a GND (de tu Arduino o fuente externa).
- Pin Central (wiper): Conecta a un pin de entrada analógica del Arduino, por ejemplo, A0.

Servomotor controlado mediante un potenciómetro conectado a un Arduino.
Código para Controlar el Servomotor con Potenciómetro
#include <Servo.h> // Incluye la librería Servo
Servo miServo; // Crea un objeto Servo
const int pinPotenciometro = A0; // Define el pin analógico donde está conectado el potenciómetro
int valorPotenciometro; // Variable para almacenar la lectura del potenciómetro
int anguloServo; // Variable para almacenar el ángulo mapeado para el servo
void setup() {
miServo.attach(9); // Asocia el servomotor al pin digital 9
Serial.begin(9600); // Inicia la comunicación serial para depuración (opcional)
}
void loop() {
valorPotenciometro = analogRead(pinPotenciometro); // Lee el valor del potenciómetro (0-1023)
// Mapea el valor del potenciómetro (0-1023) al rango de ángulo del servo (0-180)
anguloServo = map(valorPotenciometro, 0, 1023, 0, 180);
miServo.write(anguloServo); // Envía el ángulo mapeado al servomotor
// Opcional: Muestra los valores en el Monitor Serie para depuración
Serial.print("Valor Potenciometro: ");
Serial.print(valorPotenciometro);
Serial.print(" -> Angulo Servo: ");
Serial.println(anguloServo);
delay(15); // Pequeño retraso para estabilidad del movimiento
}
Explicación del Código Adicional:
int pinPotenciometro = A0;: Declara una variable para el pin analógico A0, donde se conectará el potenciómetro.valorPotenciometro = analogRead(pinPotenciometro);: Lee el voltaje en el pin A0. El Arduino convierte este voltaje en un valor digital que va de 0 a 1023 (para un Arduino de 10 bits de resolución ADC).anguloServo = map(valorPotenciometro, 0, 1023, 0, 180);: Esta es una función crucial. La funciónmap()re-escala un número de un rango a otro. Aquí, convierte el rango de lectura del potenciómetro (0-1023) al rango de movimiento del servomotor (0-180 grados).Serial.begin(9600);ySerial.print()/Serial.println(): Estas líneas son opcionales pero muy útiles para la depuración. Al abrir el «Monitor Serie» en el IDE de Arduino (el icono de la lupa en la esquina superior derecha), podrás ver los valores que está leyendo el potenciómetro y el ángulo al que se mueve el servo, lo que te ayudará a entender y solucionar problemas.
Consejos, Mejores Prácticas y Solución de Problemas
Para asegurar el éxito de tu proyecto y evitar frustraciones comunes, aquí te presento una tabla de consideraciones importantes y soluciones a problemas frecuentes.
Tabla de Problemas Comunes y Soluciones
La siguiente tabla resume los síntomas, posibles causas y las acciones correctivas más efectivas para trabajar con servomotores y Arduino:
| Síntoma | Posible Causa | Acción Correctiva |
|---|---|---|
| El servomotor no se mueve en absoluto. | Conexión de señal incorrecta o suelta. Falta de alimentación (VCC o GND). Código incorrecto o no subido. Servo dañado. | Verifica que el cable de señal esté en el pin correcto (ej. Pin 9) y bien conectado. Asegúrate de que VCC (Rojo) y GND (Marrón/Negro) estén correctamente conectados y que el servo esté recibiendo energía. Compila y sube el código nuevamente. Revisa el Monitor Serie para mensajes de error. Prueba con otro servomotor si es posible. |
| El servomotor vibra, tiembla o hace ruido excesivo. | Insuficiente corriente de alimentación o picos de voltaje. Conexión a tierra deficiente (ruido eléctrico). * Sobrecarga mecánica en el eje del servo. | Utiliza una fuente de alimentación externa para el servomotor y asegúrate de que tenga suficiente capacidad (A). Añade un condensador electrolítico (ej. 100 µF o 470 µF) entre el VCC y GND del servomotor para suavizar los picos de corriente. Asegúrate de que la conexión a tierra del servomotor y de la fuente externa esté unida a la tierra del Arduino. Verifica que no haya impedimentos mecánicos que bloqueen el movimiento del servo. |
| El Arduino se reinicia o se comporta de forma errática. | Servomotor consumiendo demasiada corriente del Arduino. Picos de corriente al arrancar o mover el servo. | Usa una fuente de alimentación externa dedicada para el servomotor. Asegúrate de que las tierras del Arduino y de la fuente externa estén conectadas (GND común). * Considera el condensador para el servo. |
| El servomotor no alcanza los 0° o 180° completos. | Calibración del servo o límites mecánicos. Servomotor de rotación limitada (no todos son 0-180° exactos). | Ajusta los valores de write() ligeramente (ej. de 5 a 175) para encontrar los límites reales de tu servo. Algunos servos tienen un rango máximo de 160° o 200°, verifica las especificaciones. |
| El movimiento es demasiado rápido o lento. | El valor del delay() entre cada paso del ángulo. | * Ajusta el valor en delay(). Un valor más pequeño (ej. 5ms) acelera el movimiento, uno más grande (ej. 50ms) lo ralentiza. |
Consideraciones Adicionales
- Tipo de Servomotor: Asegúrate de conocer si tienes un servomotor de rotación limitada (0-180/270 grados) o de rotación continua. El código
write()funciona diferente para cada uno. Para rotación limitada,write(angulo)define la posición. Para rotación continua,write(0)owrite(180)pueden indicar velocidad y dirección máxima, ywrite(90)el punto de detención. - Pines PWM: Aunque la librería
Servo.hpermite adjuntar un servomotor a casi cualquier pin digital, los pines con capacidad PWM (marcados con ~) son generalmente los más adecuados para un control preciso de la señal. - Múltiples Servos: Con un Arduino Uno/Nano, puedes controlar hasta 12 servomotores simultáneamente. Con un Arduino Mega, hasta 48. Para un número aún mayor de servos, o para reducir la carga de procesamiento del Arduino, se recomienda el uso de un driver I2C como el PCA9685, que puede controlar 16 servos con solo dos pines del Arduino.
- Calidad de los Cables: Los cables de conexión de baja calidad o demasiado finos pueden causar caídas de voltaje, especialmente con servomotores de alto consumo, lo que lleva a un rendimiento inestable.
Explorando Proyectos Avanzados con Servomotores
Una vez que hayas dominado el control básico de los servomotores, se abren un sinfín de posibilidades para proyectos más complejos y fascinantes. Aquí tienes algunas ideas para seguir experimentando y expandiendo tus conocimientos:
Ideas de Proyectos Inspiradoras
- Brazo Robótico: Construye un brazo robótico utilizando múltiples servomotores para cada articulación. Puedes controlar cada servo individualmente para mover el brazo y realizar tareas. Incluso puedes grabar secuencias de movimientos y reproducirlas.
- Sistemas de Seguimiento Solar o de Objetos: Combina servomotores con sensores de luz (fotorresistencias) o sensores de distancia (ultrasónicos) para crear sistemas que sigan la posición del sol o de un objeto, orientando un panel solar o una cámara.
- Gimbal para Cámaras: Utiliza dos servomotores (uno para el eje de inclinación y otro para el de paneo) para estabilizar una cámara o controlarla remotamente.
- Proyectos de Automoción y Maquetas: Implementa mecanismos como trenes de aterrizaje retráctiles en aeromodelos, sistemas de dirección para pequeños vehículos robóticos, o compuertas automatizadas en maquetas.
- Robots Caminantes o Bípedos: Aunque más complejos, los servomotores son el corazón de muchos robots caminantes, permitiendo movimientos articulados de las «piernas».
- Control mediante Bluetooth/WiFi: Integra módulos Bluetooth (HC-05, HC-06) o WiFi (ESP8266, ESP32) para controlar los servomotores de forma inalámbrica desde tu smartphone o computadora.
El siguiente video proporciona una demostración práctica de cómo se controlan los servomotores con Arduino y un potenciómetro, lo que te ayudará a visualizar mejor las conexiones y el funcionamiento:
Este video ilustra el control de un servomotor con un potenciómetro y Arduino, mostrando cómo la señal analógica se traduce en movimiento angular.
Preguntas Frecuentes
¿Qué diferencia hay entre un servomotor y un motor de corriente continua (DC)?
Un motor DC gira continuamente mientras reciba energía, sin control de posición. Un servomotor, en cambio, permite controlar y mantener una posición angular específica gracias a su sistema de retroalimentación interno y su circuito de control.
¿Por qué mi servomotor vibra o no se mueve correctamente?
La causa más común es una alimentación insuficiente. Los servomotores, especialmente los grandes o bajo carga, requieren picos de corriente que el Arduino por sí solo no puede proporcionar. Es crucial usar una fuente de alimentación externa dedicada para el servomotor y conectar las tierras del Arduino y de la fuente externa. Añadir un condensador electrolítico en paralelo a la alimentación del servo también puede ayudar a estabilizar el voltaje.
¿Necesito usar un pin PWM para el servomotor?
No es estrictamente necesario, ya que la librería Servo.h de Arduino puede generar las señales PWM en cualquier pin digital. Sin embargo, los pines PWM dedicados (marcados con un ~ en la placa) suelen ofrecer una mayor precisión y estabilidad para la señal.
¿Puedo controlar varios servomotores con un solo Arduino?
Sí, el Arduino Uno puede controlar hasta 12 servomotores con la librería Servo.h. Para un mayor número de servos o para aplicaciones más exigentes, se recomienda usar un Arduino Mega (hasta 48 servos) o un driver de servomotores externo como el PCA9685, que controla 16 servos a través de I2C.
¿Qué es la función map() y para qué se usa?
La función map(value, fromLow, fromHigh, toLow, toHigh) se utiliza para escalar un número de un rango a otro. En el control de servomotores con un potenciómetro, se usa para convertir el rango de lectura analógica del potenciómetro (0-1023) al rango de ángulos del servomotor (0-180 grados), simplificando la lógica de control.
Conclusión
Con esta guía detallada, has adquirido los conocimientos y las herramientas necesarias para controlar un servomotor con Arduino de manera efectiva. Desde la comprensión de su funcionamiento interno hasta la implementación de código y la solución de problemas comunes, estás listo para integrar el control de movimiento preciso en tus proyectos. La capacidad de controlar servomotores abre un vasto campo de posibilidades en la robótica, la automatización del hogar, el diseño de maquetas y mucho más. Recuerda siempre priorizar la seguridad eléctrica, especialmente cuando utilices fuentes de alimentación externas, y no dudes en experimentar y adaptar estos conceptos a tus propias ideas. ¡El mundo de la ingeniería con Arduino está a tu alcance!